Active forum topics
- Problems in progression
- Ceva’s Theorem Is More Than a Formula for Concurrency
- The Chain Rule Explained: Don't Just Memorize, Visualize It
- The Intuition Behind Integration by Parts (Proof & Example)
- Statics
- Calculus
- Hydraulics: Rotating Vessel
- Inverse Trigo
- Hydraulics: Water is flowing through a pipe
- Application of Differential Equation: Newton's Law of Cooling
New forum topics
- Ceva’s Theorem Is More Than a Formula for Concurrency
- The Chain Rule Explained: Don't Just Memorize, Visualize It
- The Intuition Behind Integration by Parts (Proof & Example)
- Statics
- Calculus
- Hydraulics: Rotating Vessel
- Hydraulics: Water is flowing through a pipe
- Inverse Trigo
- Problems in progression
- General Solution of $y' = x \, \ln x$
Recent comments
- mm equivalent of 6m1 week 3 days ago
- thankyouu!2 months 2 weeks ago
- z2 months 3 weeks ago
- Force P only impends motion…2 months 3 weeks ago
- Wow! :>3 months 1 week ago
- In general, the centroid of …3 months 2 weeks ago
- isn't the centroid of the…3 months 2 weeks ago
- I get it now, for long I was…4 months ago
- Why is BD Tension?
is it not…4 months ago - Bakit po nagmultiply ng 3/4…5 months 3 weeks ago

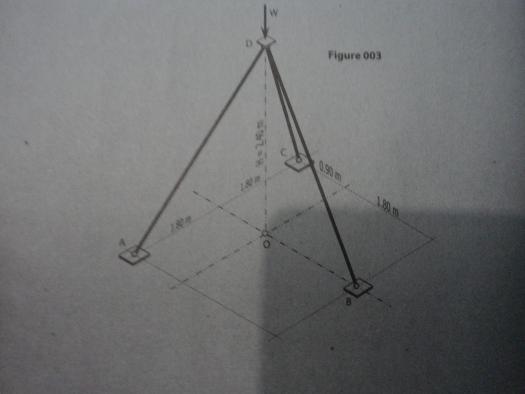
i think vector will work on
i think vector will work on it..
Use this formula:
Use this formula:
$\text{MatR} = \left[ (\text{MatA})^T \times (\text{MatB})^{-1} \right]^{-1} \times \text{MatC}$
Where,
MatR = Reaction Matrix of tripod members
MatA = Direction Matrix of tripod members
MatB = Length Matrix (diagonal matrix) of tripod members
MatC = Negative of the Load Matrix